粒子滤波(Particle Filter)
Martin J. Laubach在github上展示了一个基于python实现的粒子滤波的案例,个人认为是最好理解的。 抛开drawing代码,总共也就200+行,很容易看懂,代码地址:https://github.com/mjl/particle_filter_demo。
先看一下作者在Readme中给出的解释
This is a very simple particle filter example prompted by
Stanford's Intro to AI lectures.
A robot is placed in a maze. It has no idea where it is, and
its only sensor can measure the approximate distance to the nearest
beacon (yes, I know it's totally weird, but it's easy to implement).
Also, it shows that even very simple sensors can be used, no need
for a high resolution laser scanner.
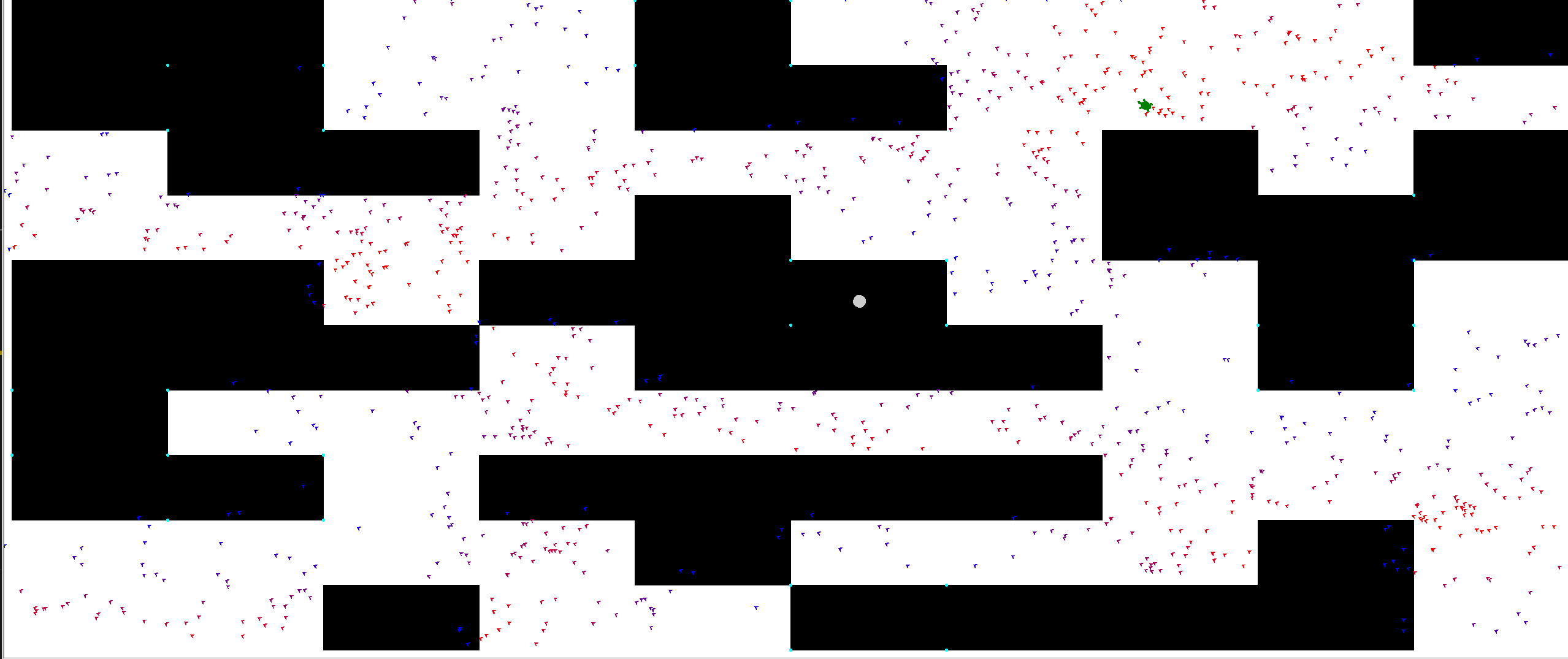
In the arena display the robot is represented by a small green
turtle and its beliefs are red/blue dots. The more a belief matches
the current sensor reading, the more the belief's colour changes to
red. Beacons are little cyan dots. For illustration purposes, we
also compute the mean of all reasonably confident particles, then
check whether that point is actually a center of a cluster. This
point is represented by a gray circle, which becomes green when the
algorithm thinks it actually determined the robot's position.
The robot then starts to randomly move around the maze. As it
moves, its beliefs are updated using the particle filter algorithm.
After a couple of moves, the beliefs converge around the robot. It
finally knows where it is!
Particle filters really are totally cool...
Start the simulation with:
python particle_filter.py
Feel free to experiment with different mazes, particles counts, etc.
Enjoy!
mjl
对应的运行截图如下:
| 
|
下面跟着他的代码一步步理解粒子滤波。
from __future__ import absolute_import
import random
import math
import bisect
from draw import Maze
"""
# Smaller maze
maze_data = ( ( 2, 0, 1, 0, 0 ),
( 0, 0, 0, 0, 1 ),
( 1, 1, 1, 0, 0 ),
( 1, 0, 0, 0, 0 ),
( 0, 0, 2, 0, 1 ))
"""
# 0 - empty square
# 1 - occupied square
# 2 - occupied square with a beacon at each corner, detectable by the robot
maze_data = ( ( 1, 1, 0, 0, 2, 0, 0, 0, 0, 1 ),
( 1, 2, 0, 0, 1, 1, 0, 0, 0, 0 ),
( 0, 1, 1, 0, 0, 0, 0, 1, 0, 1 ),
( 0, 0, 0, 0, 1, 0, 0, 1, 1, 2 ),
( 1, 1, 0, 1, 1, 2, 0, 0, 1, 0 ),
( 1, 1, 1, 0, 1, 1, 1, 0, 2, 0 ),
( 2, 0, 0, 0, 0, 0, 0, 0, 0, 0 ),
( 1, 2, 0, 1, 1, 1, 1, 0, 0, 0 ),
( 0, 0, 0, 0, 1, 0, 0, 0, 1, 0 ),
( 0, 0, 1, 0, 0, 2, 1, 1, 1, 0 ))
PARTICLE_COUNT = 2000 # Total number of particles
ROBOT_HAS_COMPASS = True # Does the robot know where north is? If so, it
# makes orientation a lot easier since it knows which direction it is facing.
# If not -- and that is really fascinating -- the particle filter can work
# out its heading too, it just takes more particles and more time. Try this
# with 3000+ particles, it obviously needs lots more hypotheses as a particle
# now has to correctly match not only the position but also the heading.
# ------------------------------------------------------------------------
# Some utility functions
def add_noise(level, *coords):
return [x + random.uniform(-level, level) for x in coords]
def add_little_noise(*coords):
return add_noise(0.02, *coords)
def add_some_noise(*coords):
return add_noise(0.1, *coords)
# This is just a gaussian kernel I pulled out of my hat, to transform
# values near to robbie's measurement => 1, further away => 0
sigma2 = 0.9 ** 2
def w_gauss(a, b):
error = a - b
g = math.e ** -(error ** 2 / (2 * sigma2))
return g
# ------------------------------------------------------------------------
def compute_mean_point(particles):
"""
Compute the mean for all particles that have a reasonably good weight.
This is not part of the particle filter algorithm but rather an
addition to show the "best belief" for current position.
"""
m_x, m_y, m_count = 0, 0, 0
for p in particles:
m_count += p.w
m_x += p.x * p.w
m_y += p.y * p.w
if m_count == 0:
return -1, -1, False
m_x /= m_count
m_y /= m_count
# Now compute how good that mean is -- check how many particles
# actually are in the immediate vicinity
m_count = 0
for p in particles:
if world.distance(p.x, p.y, m_x, m_y) < 1:
m_count += 1
return m_x, m_y, m_count > PARTICLE_COUNT * 0.95
# ------------------------------------------------------------------------
class WeightedDistribution(object):
def __init__(self, state):
accum = 0.0
self.state = [p for p in state if p.w > 0]
self.distribution = []
for x in self.state:
accum += x.w
self.distribution.append(accum)
def pick(self):
try:
return self.state[bisect.bisect_left(self.distribution, random.uniform(0, 1))]
except IndexError:
# Happens when all particles are improbable w=0
return None
# ------------------------------------------------------------------------
class Particle(object):
def __init__(self, x, y, heading=None, w=1, noisy=False):
if heading is None:
heading = random.uniform(0, 360)
if noisy:
x, y, heading = add_some_noise(x, y, heading)
self.x = x
self.y = y
self.h = heading
self.w = w
def __repr__(self):
return "(%f, %f, w=%f)" % (self.x, self.y, self.w)
@property
def xy(self):
return self.x, self.y
@property
def xyh(self):
return self.x, self.y, self.h
@classmethod
def create_random(cls, count, maze):
return [cls(*maze.random_free_place()) for _ in range(0, count)]
def read_sensor(self, maze):
"""
Find distance to nearest beacon.
"""
return maze.distance_to_nearest_beacon(*self.xy)
def advance_by(self, speed, checker=None, noisy=False):
h = self.h
if noisy:
speed, h = add_little_noise(speed, h)
h += random.uniform(-3, 3) # needs more noise to disperse better
r = math.radians(h)
dx = math.sin(r) * speed
dy = math.cos(r) * speed
if checker is None or checker(self, dx, dy):
self.move_by(dx, dy)
return True
return False
def move_by(self, x, y):
self.x += x
self.y += y
# ------------------------------------------------------------------------
class Robot(Particle):
speed = 0.2
def __init__(self, maze):
super(Robot, self).__init__(*maze.random_free_place(), heading=90)
self.chose_random_direction()
self.step_count = 0
def chose_random_direction(self):
heading = random.uniform(0, 360)
self.h = heading
def read_sensor(self, maze):
"""
Poor robot, it's sensors are noisy and pretty strange,
it only can measure the distance to the nearest beacon(!)
and is not very accurate at that too!
"""
return add_little_noise(super(Robot, self).read_sensor(maze))[0]
def move(self, maze):
"""
Move the robot. Note that the movement is stochastic too.
"""
while True:
self.step_count += 1
if self.advance_by(self.speed, noisy=True,
checker=lambda r, dx, dy: maze.is_free(r.x+dx, r.y+dy)):
break
# Bumped into something or too long in same direction,
# chose random new direction
self.chose_random_direction()
# ------------------------------------------------------------------------
world = Maze(maze_data)
world.draw()
# initial distribution assigns each particle an equal probability
particles = Particle.create_random(PARTICLE_COUNT, world)
robbie = Robot(world)
while True:
# Read robbie's sensor
r_d = robbie.read_sensor(world)
# Update particle weight according to how good every particle matches
# robbie's sensor reading
for p in particles:
if world.is_free(*p.xy):
p_d = p.read_sensor(world)
p.w = w_gauss(r_d, p_d)
else:
p.w = 0
# ---------- Try to find current best estimate for display ----------
m_x, m_y, m_confident = compute_mean_point(particles)
# ---------- Show current state ----------
world.show_particles(particles)
world.show_mean(m_x, m_y, m_confident)
world.show_robot(robbie)
# ---------- Shuffle particles ----------
new_particles = []
# Normalise weights
nu = sum(p.w for p in particles)
if nu:
for p in particles:
p.w = p.w / nu
# create a weighted distribution, for fast picking
dist = WeightedDistribution(particles)
for _ in particles:
p = dist.pick()
if p is None: # No pick b/c all totally improbable
new_particle = Particle.create_random(1, world)[0]
else:
new_particle = Particle(p.x, p.y,
heading=robbie.h if ROBOT_HAS_COMPASS else p.h,
noisy=True)
new_particles.append(new_particle)
particles = new_particles
# ---------- Move things ----------
old_heading = robbie.h
robbie.move(world)
d_h = robbie.h - old_heading
# Move particles according to my belief of movement (this may
# be different than the real movement, but it's all I got)
for p in particles:
p.h += d_h # in case robot changed heading, swirl particle heading too
p.advance_by(robbie.speed)
